
Release notes#
This content is autogenereated from our Github release notes.
v5.1.0#
Release Notes#
Major Changes#
Integer Variable Support#
do-mpc now supports integer variables for Mixed Integer Nonlinear Programming (MINLP). Variables must be declared as integer during model creation. The MINLP problems are solved using the BONMIN solver. See the documentation and the new example for implementation details.
PyTorch Installation Changes#
PyTorch is no longer included in the default installation to keep the package size small for users who don’t need the ApproximateMPC feature. To use the ApproximateMPC feature, install the full package:
pip install do_mpc[full]
Minor Changes#
R-term Scaling for Multi-stage MPC#
Fixed R-term scaling in multi-stage MPC formulations. Previously, the R-term was not scaled by the number of scenarios, causing its influence on the optimizer solution to increase with scenario count.
Bug Fixes and Testing#
FIxed a bug that caused an offset between simulator and MPC when visualizing tvp’s.
Added new unit test
Upgrading#
Users relying on ApproximateMPC should update their installation command to include the full extras:
pip install --upgrade do_mpc[full]
v5.0.1#
Bug Fixes#
Fixed ImportError for approximateMPC module
Added missing
do_mpc.approximateMPCpackage tosetup.pyModule can now be imported correctly after pip installation
Please see the notes of release v5.0.0.
v5.0.0#
do-mpc v5.0.0#
We are happy to announce the release of do-mpc v5.0.0. Thanks to everyone who has contributed, for the feedback and all the interest.
This release introduces Approximate MPC as a machine learning-based approximation of the MPC class, enabling MPC deployment in systems where real-time optimization is not feasible. Our goal with this feature is to provide an easy-to-use interface that requires no expert knowledge while still allowing users to customize the model and training process. Additionally, we introduce the Extended Kalman Filter as the newest addition to our state estimators.
We hope you will like the new features and content. Development will now continue with enhancements to the Approximate MPC feature and the implementation of parameter estimation in version 5.1.0. Stay tuned on our GitHub page and feel free to open issues or join the discussion!
Major changes#
Approximate MPC#
Approximate MPC uses an artificial neural network trained to approximate an MPC controller. It predicts the optimal control action based on the current state of the system. This feature introduces the following classes to do-mpc:
ApproxMPC: A class to configure and run the ApproxMPC controller based on a previously configured
do_mpc.controller.MPCinstance.FeedforwardNN: A class to set up a PyTorch neural network used by the ApproxMPC class.
Trainer: A class for training the ApproxMPC.
AMPCSampler: A class to sample data for the ApproxMPC using do-mpc’s existing sampling planner.
After setup, the ApproxMPC class can be used like a do_mpc.controller.MPC instance in a closed-loop setting by calling the make_step() method. This method takes the current state x0 of the system and returns the control action u0.
For a detailed introduction to the setup and application of the Approximate MPC feature, we provide a new example notebook.
Extended Kalman Filter#
The Extended Kalman Filter (EKF) is now available as a state estimator option alongside the existing Moving Horizon Estimator (MHE).
Like the MHE, the EKF class is built upon our Estimator base class, making it fit seamlessly into the existing do-mpc framework. When used with nonlinear systems, do-mpc computes linearized system matrices under the hood. The current EKF implementation works with discrete and continuous models. It can be used to estimate differential states x. Models with algebraic states z are currently not supported.
For a detailed introduction to the setup and application of the EKF state estimator, we provide a new example implementation.
Documentation#
As always, we keep our documentation up to date, which contains detailed documentation for all new classes of do-mpc.
Minor changes#
Scaling methods for the Simulator class.
New examples including a triple tank system example implementation and a kinematic bicycle model
Example code demonstrating how to use a PyTorch model in do-mpc
do-mpc 5.0.0 is tested for Python 3.10, 3.11, and 3.12
Version restrictions for Numpy removed
v4.6.5#
Minor changes#
This release is a response to the release of Numpy 2.0.0. Until all version conflicts are resolved, Numpy is restricted to numpy<2.0.0.
Further changes are:#
The
optsdictionary in simulator.py is now initialized correctly whencollocationis selected as integration toolimportlib.util is now imported correctly when importing do-mpc
v4.6.4#
Release notes#
Please see the notes of release v4.6.3.
v4.6.3#
Minor changes#
The penalty term (
rterm) of the MPC formulation can now be customized. For more information, see the documentationAll CasADI integrator options can now be accessed via the
simulator.settingssyntax. For more information see the documentationThe
settingsattribute of theMPCandSimulatorclasses is now called_settings. It can be accessed via thesettingsmethod. The user interface remains identical.Minor bug fixes in the documentation an the
Simulatorclass
v4.6.2#
Minor changes#
Added new settings attribute in
_mpc.pyAdded citation file
v4.6.1#
Minor changes#
Fixed #387
do-mpccan now be installed either as:
pip install do_mpc
or
pip install do_mpc[full]
Only with the full installation, optional features are available, e.g.:
ONNX conversion
OPCUA
Backend changes#
Fixed readthedosc configuration according to the new specification
New setup for requirement files (splitting the pip requirements files according to this description):
requirements.txtlists the base requirements for the do-mpc core features.requirements_full.txtis a superset of requirements and includes optional do-mpc features (e.g. ONNX conversion).requirements_docs.txtis a superset of the full requirements and includes the packages required to build the docs.
v4.6.0#
Major changes#
For detailed information on the major changes, please visit our website www.do-mpc.com.
OPC UA module#
Building on the opcua-asnycio library, do-mpc now facilitates plant communication and software-in-the-loop testing with OPC UA.
Core MPC modules can automatically derive and OPC UA client
A local OPC UA server can be configured with namespace derived from clients for testing purposes
Interoperability with deep learning toolboxes through ONNX#
do-mpc now supports the open neural network exchange (ONNX) standard.
Incorporate neural networks previously trained in Tensorflow, Pytorch, Matlab, etc. (with an option to export ONNX models)
Convert ONNX models to CasADi expressions (the backbone of
do-mpc).
Improved interface for settings in the MPC, MHE, Simulator, etc.#
All do-mpc core modules now have the important new attribute settings.
Previously, settings were passed to set_param. This method is still available and wraps the new interface. The new method has important advantages:
The
settingsattribute can be printed to see the current configuration.Context help is available in most IDEs (e.g. VS Code) to see the available settings, the type and a description.
Relaunch of documentation#
We have significantly improved our documentation with a polished new look and included typing information for an improved workflow.
v4.5.1#
Please see the changes for v.4.5.0. This is a minor update to fix the installation routine of do-mpc.
v4.5.0#
Major changes#
Linear control#
Newly implemented class
LinearModel. The linear model can be created by:linearizing a regular (nonlinear)
Modelinstancepassing system matrices
(A,B,C,D)creating (linear) equations in
LinearModelwith the well known syntax used inModel.
Discretize a (continuous-time)
LinearModel.Setup the new discrete-time linear quadratic regulator (
LQR) controller class
Data-based system identification with neural networks#
Use neural networks as system models in do-mpc
ONNXConversioncan convert a previously trained and stored neural network to a CasADi graphONNX files can be exported from most major neural network frameworks (e.g. tensorflow, pytorch, matlab, …)
Some limitations to the neural network operations apply.
Minor changes#
Compile NLP#
The
MHE,MPCclasses can now export and compile the NLP.Compiled NLPs can be loaded and solved. This may result in faster optimization times.
Improved sampling tools for data generation#
Optional parameters in
__init__ofSampler,SamplingPlanner,DataHandlerthat are passed toset_param. This allows for a more concise setup.SamplingPlannermethodproductto create cartesian product (grid) of input variables to create test cases.
Simulator#
Simulator.make_step()can now be called without control input for autonomous systems.
Bug fixes#
Example files now import do-mpc relative path with
os.path.jointo yield a OS agnostic implementation.MHEclass can now be created without estimating parameters.Solves visualization bug described in #340
Backend#
Significant code refactoring
Many modules (e.g.
controller.py) were getting to largeIndividual files (e.g.
_mpc.py) in subfolderdo_mpc/controller/for large classesUser-facing classes (e.g.
MPC) imported indo_mpc/controller/__init__.py.Imported such that
do_mpc.controller.MPCstill yields theMPCclassNo changes in front-end for users
Recursive documentation with Sphinx / Readthedocs is fully automated now. Important considerations:
Private files (marked as e.g.
_mpc.py) are not documentedImported modules are documented (e.g. the imported
MPCclass.Importing with
from casadi import *could result in documentation of CasADi package in do-mpc. This is avoided by:Explicitly excluding certain packages (e.g.
casadi) to be documented.Marking functions or classes as private with
_Name.Using the
__all__ = [...]variable to mark in certain files the list of elements that should be documented.
v4.4.0#
Major changes#
MHE/MPC bounds on optimiziation variables can now be changed after calling
mhe.setup()andmpc.setup()respectively (fixes #289). The simplest way to set bounds is themhe.boundsandmpc.boundsproperty (docs)More granular control over the bounds is now possible, e.g. choosing different values for each time-step of the horizon or for different collocation points (if that makes sense). For this purpose two now properties
lb_opt_xandub_opt_xare now documented and accessible to the user. These properties are indexed similarly to the property opt_x. Importantly, setting new values on these structure automatically considers the scaling factors.The do-mpc model can now be pickled. Pickling is restricted, however and requires (error messages are thrown otherwise):
the model class must be setup
the model must use
SXsymbolic variables
Enhanced warmstarting: The solver is now supplied with a guess for the dual variables
Minor changes#
Bug fix: MPCData.prediction was previously unable to query algebraic states
_z.Fixed #283: Algebraic states can now be plotted with the graphics package
v4.3.5#
Minor fixes#
Setup for release in v4.3.4 was incomplete.
v4.3.4#
Minor fixes#
model.auxcan now be queried before callingmodel.setup()Some typos in documentation
v4.3.3#
Major changes#
DataHandlerclass can now createpost_processing_functionconsidering inputs from the case-definition as created in theSamplingPlanner.
Minor changes#
All cost terms that are continuously appended to are now initialised with value
DM(0). If nothing is appended (i.e. the term is not active), this avoids unclear error messages. This should fix #214 and #86
Documentation#
Minor fixes.
Example files#
Please download the example files for release v4.3.3 here.
v4.3.2.#
Major fixes#
Solved #215
Hoping to solve #233
v4.3.1#
Fixed an issue with release 4.3.0 where sampling tools where not included on pypi.
v4.3.0#
Major changes#
do-mpc sampling tools#
With this release we are integrated a major new feature in do-mpc which was originally started at the do-mpc developer conference 2021. To learn more about the new feature we have prepared a video tutorial.
Minor changes#
Fixed an issue with saving computation time in MHE/MPC in data object.
New example: Kite systems
Example files#
Please download the example files for release v4.3.0 here.
v4.2.5#
Major changes#
Full customization of the MPC or MHE optimization problem is now possible.
Instead of using MPC.setup() to finalize the MPC optimization problem, an alternative two step process is now possible:
MPC.prepare_nlp()MPC.create_nlp()
In between these two calls, users can add custom constraints and terms to the cost function using state, input etc. variables from different time-steps, collocation points or scenarios. A typical example would be to constrain changes of inputs or two enforce a cyclic behavior over the course of the horizon.
The new feature is fully documented and we suggest to have a look at the API reference for the MPC or MHE object.
Backend#
Model#
Internal functions in do_mpc.model.Model class have now properly named inputs and outputs. These inputs/outputs were previously automatically named i0, i1, .... They are now name e.g. _x, _u, _z ....
Here is an example (from the backend):
self._rhs_fun = Function('rhs_fun',
[_x, _u, _z, _tvp, _p, _w], [self._rhs], ### variables
["_x", "_u", "_z", "_tvp", "_p", "_w"], ["_rhs"]) ### names
This may help for debugging because we now have that:
model = do_mpc.model.Model("continuous")
....
model.setup()
print(model._rhs_fun)
Returns
Function(rhs_fun:(_x[6],_u,_z[3],_tvp,_p[2],_w[0])->(_rhs[6]) SXFunction)
v4.2.0#
Major changes#
MX support#
This addresses #34.
The do-mpc model class can now be created with the symvar_type argument, defining whether the model is using CasADi SX or MX optimization variables.
model = do_mpc.model.Model('continuous', 'MX')
all classes (MPC, MHE, Simulator …) created from a MX model will also use MX variables.
From a users-perspective the change has no significant influence on the experience.
It does, however, allow for significantly faster matrix vector operations, which is main motivation to use the MX support.
The new feature resulted in some major changes to the backend. This is because CasADi does not allow (e.g.):
x = MX.sym('x')
struct_symMX([
entry('x', sym=x)
])
on which the model configuration heavily relied on.
Most importantly:
The Model class attributes
_x,_uetc. are now dicts prior to callingModel.setup.Calling
model['x']still works prior to callingModel.setupbut works differently internallya new method
_convert2structconverts dicts (e.g. of all the states) to symbolic structures (used inModel.setup). The only problem: These structs hold variables with the same name but which are different.a new method
_substitute_struct_varsis introduced and substitutes the variables in the dicts in all expressions (e.g._rhswith the new variables from the symbolic structs.the MHE also required some major internal changes. The problem is that we split the parameters (
_p) for the MHE into estimated and set parameters. Splitting symbolic variables with the MX type is problematic.
Minor changes#
Solved #149 : Option to only have a single slack variable (for each soft-constraint) over the entire horizon
Bug fixes#
Resolves #89. Discrete-time model now inherits its properties to MHE/MPC etc.
v4.1.1#
Major changes#
Adapted time-varying parameters for MPC object#
Time-varying parameters (tvp) are now defined for k=0,...,N+1 as opposed to k=0,...,N in the previous version.
The main consequence is that the mterm for mpc.set_objective can now include the tvp in its expression.
This is beneficial e.g. for set-point tracking.
Documentation#
Time-varying parameters are also described in greater detail now in this article.
do-mpc v4.1.0#
Major changes#
DAE support#
This addresses the long overdue #3 (and closes #36). DAE works for both discrete time and continuous time formulations.
DAE’s are introduced in the model with the set_alg method.
Algebraic states are introduced with the set_variable method and have the
var_type='_z'.The model checks that for each newly introduced algebraic state there must be one new algebraic equation. Otherwise the problem is under-determined.
Algebraic states can be scaled and bounded in both MHE and MPC similar to states, inputs etc. The algebraic equations itself are not automatically scaled. This is different for the ODE which is scaled with the scaling factor for its respective state.
Continuous time (orthogonal collocation)#
When using DAEs with continuous time models the DAE equation is added as an additional constraint at each collocation point (both for MHE/MPC).
The simulator must use the idasintegration tool (or some other tool supporting DAEs). The default tool cvodes does not support DAE equations.
Discrete time#
When using DAEs with continuous time models the DAE equation is added as an additional constraint at each time-step (both for MHE/MPC).
The simulator cannot simply evaluate the discrete time equation to obtain the next state as it is an expression of the unknown algebraic states. Thus we first solve the algebraic equation with the current state, input etc (using nlpsol) and then evaluate the discrete time equation with the obtained algebraic states.
Constraints with MPC / MHE with orthogonal collocation#
Added a flag that can be set during MPC / MHE setup to choose whether inequality constraints are evaluated for each collocation point or only on the beginning of the finite Element. The flag is set during setup of the MPC / MHE with the set_param method:
mpc = do_mpc.controller.MPC(model)
setup_mpc = {
'n_horizon': 20,
't_step': 0.005,
'nl_cons_check_colloc_points': True,
}
mpc.set_param(**setup_mpc)
Currently defaults to False.
Added a flag that can be set during MPC / MHE setup to choose whether bounds (lower and upper) are evaluated for each collocation point or only on the beginning of the finite Element. The flag is set during setup of the MPC / MHE with the set_param method:
mpc = do_mpc.controller.MPC(model)
setup_mpc = {
'n_horizon': 20,
't_step': 0.005,
'cons_check_colloc_points': True,
}
mpc.set_param(**setup_mpc)
Currently defaults to True.
Terminal bounds for MPC#
This fixes #35 .
The MPC controller now supports terminal bounds for the states which can be different to the generic state constraints set with the bounds attribute.
Set terminal bounds with the new terminal_bounds attribute.
If no terminal bounds are explicitly set, they default to the regular state bounds (this means that previously working examples won’t have to add terminal bounds to obtain the same results).
If this behavior is undesired (e.g. terminal state should be unbounded even though all other states are bounded) set the parameter
use_terminal_bounds=Falseduring MPC setup.
Minor changes#
MPC.set_objective: Themterm(terminal cost) now allows parameters (_p) in the formulation.Simulator.set_initial_guess: Introduced this method to set the initial guess for the algebraic variables. The guess is based on the class attributesz0which is inline with how the estimator and controller work.Simulator.make_step: No longer takes the initial value/guess forx0andz0as arguments. The initial statex0can be changed via its class attribute whereas the initial guess forz0is changed as described above.Adressed #71 : The initial state is no longer constrained through upper and lower bounds.
Adressed #65 and removed depreciated methods from all modules.
Documentation#
New non-linear example on the front page (double inverted pendulum with obstacle avoidance). This adresses #70.
Fixed documentation of
MPC.opt_x_num. This fixes #72
Example files#
Please download the example files for release do-mpc v4.1.0 here.
do-mpc v4.0.0#
We are finally out of beta with do-mpc v4.0.0. Thanks to everyone who has contributed, for the feedback and all the interest. This release includes some important changes and bugfixes and also significantly extends our homepage do-mpc.
We hope you will like the new features and content. Development will now continue with work on version 4.1.0 (and potentially some in between versions with minor features). Stay tuned on our Github page and feel free to open issues or join the discussion!
Major changes#
New properties for Simulator, Estimator and MPC#
Inheriting from the new class IteratedVariables these classes now obtain the attributes _x0, _u0, _z0 (and _p_est0). Users can access these attributes with the properties with x0, u0, z0 (and p_est0), which are listed in the documentation and have sanity checks etc. when setting them. This fixes e.g. #55.
These new properties are used for two things:
Set initial values#
For the simulator the initial state is self explanatory and a very important attribute.
For the MHE and MPC class the attributes are used when calling the important set_initial_guess method, which does exactly that: Set the initial guess of the optimization problem.
Obtain the current values of the iterated variables#
This is very useful for conditional MPC loops: E.g. stop the controller and simulation when a certain state has reached a certain value.
Measurement noise#
Currently, the do_mpc.model.Model.set_rhs method allows to set an additive process noise.
This is used for the MHE optimization problem.
In a similar fashion, the do_mpc.model.Model.set_meas method now allows to set an additive measurement noise.
In the MHE the measurement noise is introduced as a new optimization variable and the measurement equation is added as an additional constraint.
The full optimization problem now looks like this:
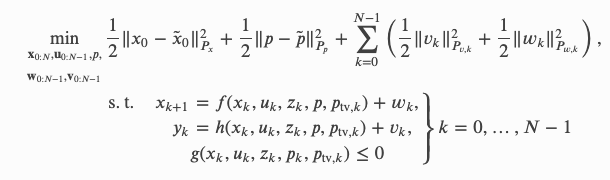 This change makes it possible for the user to decide, which measurements are enforced and which can be perturbed. A typical example would be to ensure that input “measurements” are completely trusted.
This change makes it possible for the user to decide, which measurements are enforced and which can be perturbed. A typical example would be to ensure that input “measurements” are completely trusted.
Simulator with disturbances#
The newly introduced measurement noise and the existing process noise are now used within the simulator. With each call of Simulator.make_step values can be passed to obtain an imperfectly simulated and measured system..
Documentation#
Release notes are now included in the documentation. They are autogenerated from the Github release notes which can be accessed via Rest API.
The release notes are appended with a section that includes a download link for the example files that were written for the respective versions.
Installation instructions now refer to these download links. This solves #62 .
Added new section Example gallery, explaining the supplied examples in do-mpc in Jupyter Notebooks (rendered on readthedocs)
Added new section Background with various articles explaining the mathematics behind do-mpc.
Parameter
collocation_niin MPC/MHE is now explained more clearly.
Minor changes#
Renamed
model.setup_model()->model.setup()in all examples. This adresses #38opt_p_numandopt_x_numfor MHE/MPC are now instance properties instead of class attributes. They still appear in the documentation and can be used as before. Having them as class attributes can lead to problems when multiple classes are live during the same session.
Example files#
Please download the example files for release do-mpc v4.0.0 here.
do-mpc v4.0.0-beta3#
Major changes#
Data#
New
__getitem__method to conveniently retrieve values fromDataobject (details here)New
MPCDataclass (which inherits formData). This adds thepredictionmethod, which can be used to query the optimal trajectories. Details here.
Both methods were previously (in a slightly different form) in the Graphics module. They are still used in this class but can also be convenient under different circumstances.
Graphics#
The Graphics module is now initialized with a specific Data instance (e.g. mpc.data). Each Data class has their own Graphics class (if it is supposed to be displayed).
Compared to the previous implementation, we now initialize all lines that are supposed to be plotted (and store them in pred_lines and result_lines). During runtime, the data on these lines is getting updated.
Added new
structureclass indo_mpc.tools. Used for tracking the newGraphicsproperties:pred_linesandresult_lines.The properties
pred_linesandresult_linescan be used to retrieve line instances with power indices. Line instances can be easily configured (linestyle, alpha, color etc.)
Process noise#
Process noise can be added to rhs of Model class: link
This is solving issue #53 .
This change was necessary to allow for the more natural MHE formulation where the process noise is penalised in the cost function. The user can define for each state (vector) individually if this is intended or not.
As a consequence of this change I had to introduce the new variable w throughout do-mpc. For the MPC and simulator module this is without effect.
The main difference is here
Remark: The change also allows to estimate parameters that change over time (e.g. environmental influences). Our regular estimated parameters are constant over the entire MHE horizon, which is not always valid. To estimate varying parameters, they should be defined as states with unknown dynamics. Concretely, their RHS is zero (for ODEs) and they have a high process noise.
Symbolic variables for MHE weighting matrices#
As originally intended, it is now possible to have symbolic matrices as MHE tuning factors. The result of this change can be seen in the rotating_oscillating_masses example.
The symbolic variables are defined in the do-mpc Model where typically, you want to have P_x and P_p as parameters and P_y and P_w as time-varying parameters. Example of their definition.
and here they are used.
The purpose of using symbolic weighting is of course to update them at each iteration. Since they are parameters and time-varying parameters respectively, this is done with the set_p_fun and set_tvp_fun method of the MHE: link
Note that in the example above, we don’t actually need varying weighting matrices and the returned values are in fact constant. This can be seen as a proof of concept.
This change had some other implications. Most notably, having additional parameters interferes with the multi-stage robust MPC module. Where we previously had to pass
a number of scenarios for each defined parameter.
Since parameters for the MHE are irrelevant for MPC the API for the call set_uncertainty_values has changed: link
The new API is fully backwards compatible. However, it is much more intuitive now. The function is called with keyword arguments, where each keyword refers to one uncertain parameter (note that we can ignore the parameters that are irrelevant). In practice this looks something like this
Example files#
Please download the example files for release do-mpc v4.0.0-beta3 here.
do-mpc v4.0.0-beta2#
Error in release. Immediately replaced with beta3.
do-mpc v4.0.0-beta1#
Major changes#
We are now explicitly pointing out attributes of the
Modelsuch as states, inputs, etc. These should be used to obtain these attributes and replace the previousget_variablesmethod which is now depreciated. TheModelalso supports a__get_variable__call now to conveniently select items.setup_modelis replaced bysetupto be more consistent with other setup methods. The old method is still available and shows a depreciation warning.The MHE now supports the
set_default_objectivemethod.
Bug fixes#
The MHE formulation had an error in the
make_stepmethod. We used the wrong time step from the previous solution to compute the arrival cost.
Other changes#
Spelling in documentation
New guide about installing HSL linear solver
Credits in documentation
Example files#
Please download the example files for release do-mpc v4.0.0-beta1 here.
do-mpc v4.0.0-beta#
do-mpc has undergone a massive overhaul and comes with a completely new interface, new features and a comprehensive documentation.
Please note that previously written code is not compatible with do-mpc 4.0.0. If you want to continue working with older code please use version 3.0.0.
This is the beta release of version 4.0.0. We expect minor modifications and bug fixes in the near future.
Please see our documentation on our new project homepage www.do-mpc.com for a full list of features.
Example files#
Please download the example files for release do-mpc v4.0.0-beta here.
do-mpc v3.0.0#
Main modifications#
Support for CasADi version 3.4.4
Support for time-varying parameters
Support for discrete-time systems
do-mpc v2.0.0#
Compatible with CasADi 3.0.0